Background
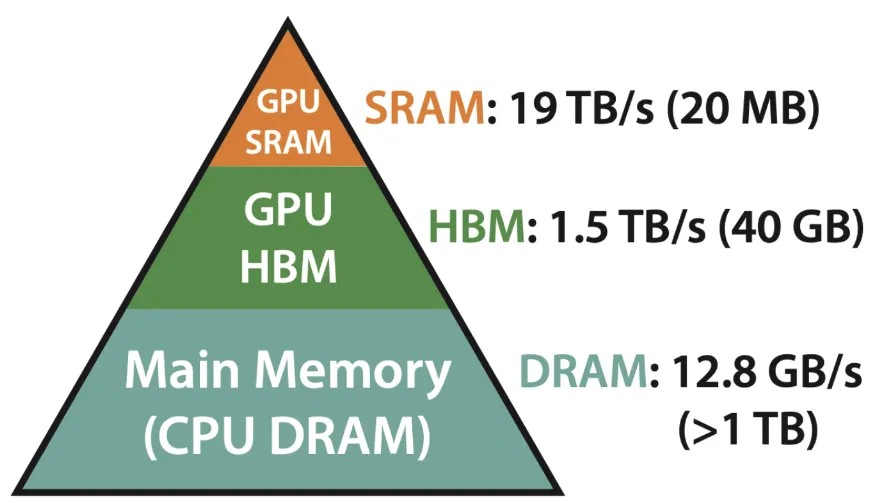
GPU Memory Model
- SRAM (Static RAM)
- Located inside the GPU core, it utilizes Registers, L1 Cache, and L2 Cache:
- Registers — These are tiny, ultra-fast memory locations within each GPU core. Registers store immediate values that a core is actively processing, making them the fastest type of memory.
- L1 Cache — This is the first-level cache inside a Streaming Multiprocessor (SM). It stores frequently accessed data to speed up calculations and reduce access to slower memory (like DRAM).
- L2 Cache — This is a larger, second-level cache that is shared across multiple SMs. It helps store and reuse data that might not fit in L1 cache, reducing reliance on external memory (VRAM).
- HBM
- Bigger capacity
GPU Architecture
GPU
└── SM × N (e.g., 108 on A100)
└── Warp Schedulers × 4 (每个SM)
└── Warp × 多个 (每个SM可同时驻留多个warps)
└── Threads × 32 (固定,一个warp)
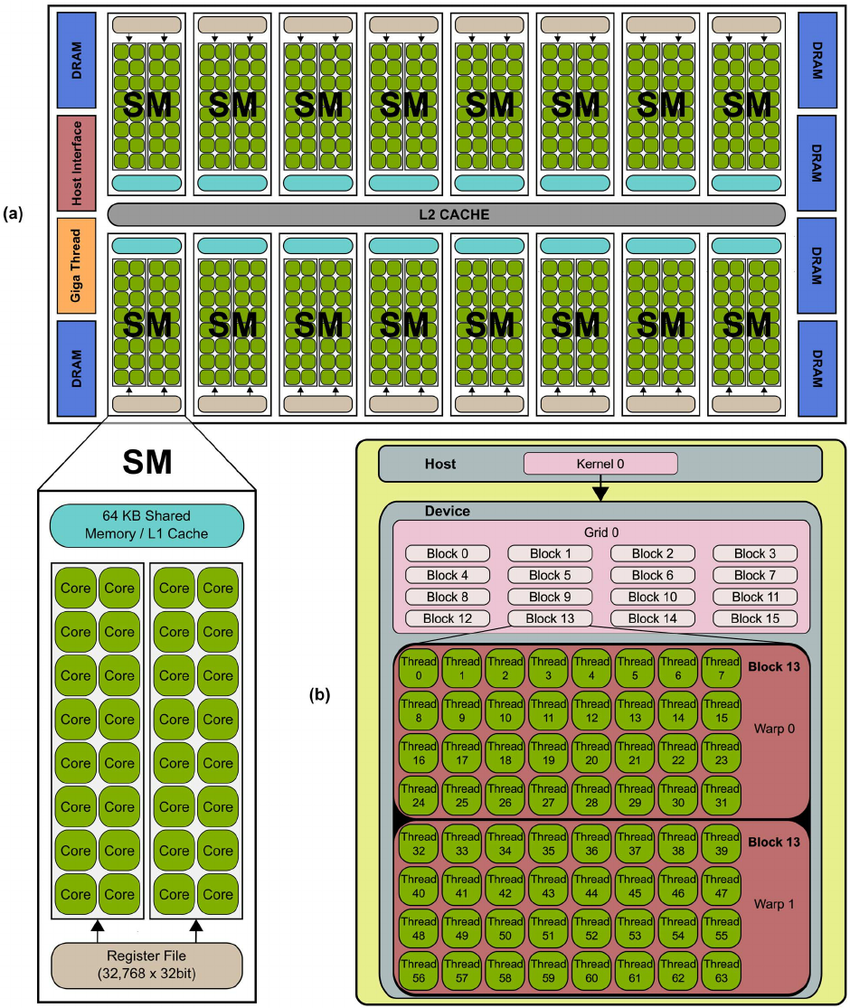
Streaming Multiprocessor
A Streaming Multiprocessor (SM) is the fundamental processing unit of a GPU.
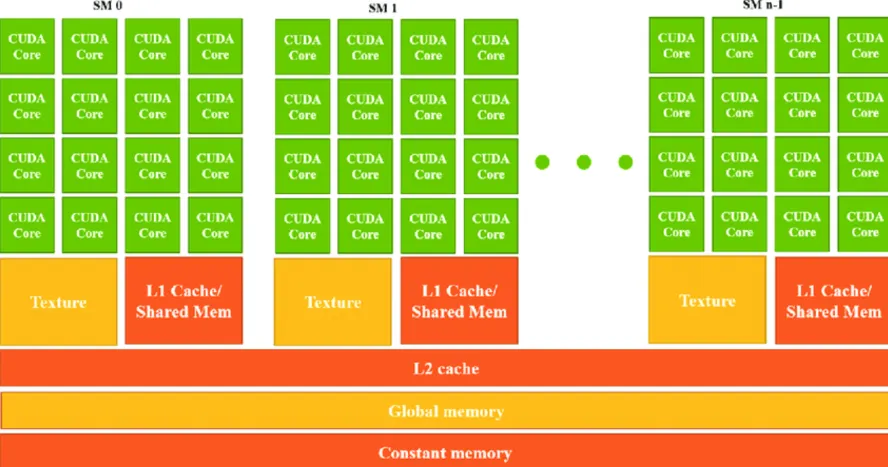
- Each SM contains multiple GPU cores, a small memory pool (SRAM), and execution units.
- Each SM operates independently, handling multiple programs in parallel.
- The number of SMs in a GPU directly affects its computational power.
When a program runs on a GPU, it gets split across multiple SMs, and each SM works on a chunk of data. More SMs mean better performance.
Cores and Warps
GPU Cores: The Smallest Compute Unit
- A core is the smallest unit of computation in a GPU.
- Unlike CPU cores, GPU cores are optimized for Floating Point Operations (FLOPs).
- Each core can perform one FLOP per cycle.
Warps: Groups of GPU Cores
- GPU cores are grouped into warps.
- Nvidia GPUs have 32 cores per warp, while AMD GPUs have 64 cores per warp.
- All cores in a warp must execute the same instruction simultaneously but operate on different data.
CUDA Model
- 一个 Block 被调度到一个 SM 上执行
- 同一 Block 内的所有 threads 共享该 SM 的 Shared Memory
- 不同 Blocks 之间无法直接通信(除非通过 global memory)
Example:
Grid (整个 kernel 启动)
└─ Blocks (多个独立的工作组)
└─ Threads (Block 内的并行线程)
__global__ void vectorAdd(const float *A, const float *B, float *C, int n) {
// 计算当前线程对应的全局索引
int idx = blockIdx.x * blockDim.x + threadIdx.x;
// 边界检查:确保不越界
if (idx < n) {
C[idx] = A[idx] + B[idx];
}
}
int threadsPerBlock = 256;
int blocksPerGrid = (n + threadsPerBlock - 1) / threadsPerBlock;
vectorAdd<<<blocksPerGrid, threadsPerBlock>>>(d_A, d_B, d_C, n);
在写 CUDA 代码时,需要以 Threads 作为视角
Triton Model
CUDA: Grid → Blocks → Warps (32 threads) → Threads
↓
Triton: Grid → Programs → [自动 vectorization]
Triton 隐藏了 Warp 和 Thread 的细节,让你只需关注 Program 级别的并行。
每个 Program 是一个独立的执行单元:
- 处理一块连续的数据(如 1024 个元素)
- 在一个 SM 上执行
- Program 之间完全独立,无法通信
| 概念 | CUDA | Triton |
|---|---|---|
| Grid Dimensions | gridDim | grid= 参数 |
| Block Index | blockIdx | tl.program_id() |
| Block Dimensions | blockDim (threads per block) | 隐藏 (由编译器根据 BLOCK_SIZE 决定) |
| Thread Index | threadIdx | 隐藏 |
| Shared Memory | 手动管理 (__shared__) | 隐藏 (编译器自动管理) |
1-Vector Addition
向量级别的操作非常符合直觉,把一个向量按照 BLOCK_SIZE 进行切分,同时执行多个 program, 每个 program 只负责 BLOCK_SIZE 个数据
import torch
import triton
import triton.language as tl
DEVICE = triton.runtime.driver.active.get_active_torch_device()
@triton.jit
def add_kernel(x_ptr, # *Pointer* to first input vector.
y_ptr, # *Pointer* to second input vector.
output_ptr, # *Pointer* to output vector.
n_elements, # Size of the vector.
BLOCK_SIZE: tl.constexpr, # Number of elements each program should process.
# NOTE: `constexpr` so it can be used as a shape value.
):
# There are multiple 'programs' processing different data. We identify which program
# we are here:
pid = tl.program_id(axis=0) # We use a 1D launch grid so axis is 0.
# This program will process inputs that are offset from the initial data.
# For instance, if you had a vector of length 256 and block_size of 64, the programs
# would each access the elements [0:64, 64:128, 128:192, 192:256].
# Note that offsets is a list of pointers:
block_start = pid * BLOCK_SIZE
offsets = block_start + tl.arange(0, BLOCK_SIZE)
# Create a mask to guard memory operations against out-of-bounds accesses.
mask = offsets < n_elements
# Load x and y from DRAM, masking out any extra elements in case the input is not a
# multiple of the block size.
x = tl.load(x_ptr + offsets, mask=mask)
y = tl.load(y_ptr + offsets, mask=mask)
output = x + y
# Write x + y back to DRAM.
tl.store(output_ptr + offsets, output, mask=mask)
2-Fused Softmax
二维矩阵就会涉及到如何切分了,或者说每个 Program 负责哪个部分
Vector Addition:
- 1D 问题:直接映射到一维数组
- 每个元素独立:
c[i] = a[i] + b[i] - 数据量:假设 100,000 个元素
- 策略:启动 100 个 programs,每个处理 1000 个元素
Softmax:
- 2D 问题:按行计算(每行内的元素有依赖关系)
- 每行需要:max → exp → sum → divide
- 数据量:假设 10,000 行,每行 1024 个元素
- 问题:是否启动 10,000 个 programs?
启动 10000 个 Programs 的开销太大了
这里其实涉及到两个范式:
- Fixed-Size Grid
- Grid-Stride Loop
@triton.jit
def fixed_grid_kernel(data_ptr, n_elements, BLOCK_SIZE: tl.constexpr):
# 获取当前 program ID
pid = tl.program_id(0)
# 计算当前 program 负责的元素范围
offsets = pid * BLOCK_SIZE + tl.arange(0, BLOCK_SIZE)
mask = offsets < n_elements
# 加载数据
data = tl.load(data_ptr + offsets, mask=mask)
# 处理数据
result = process(data)
# 存储结果
tl.store(data_ptr + offsets, result, mask=mask)
# 调用:grid size 根据数据量计算
n_elements = 10000
BLOCK_SIZE = 1024
grid = (triton.cdiv(n_elements, BLOCK_SIZE),) # = 10 个 programs
fixed_grid_kernel[grid](data, n_elements, BLOCK_SIZE)
@triton.jit
def grid_stride_kernel(data_ptr, n_elements, BLOCK_SIZE: tl.constexpr):
# 获取当前 program ID 和总 program 数
pid = tl.program_id(0)
num_programs = tl.num_programs(0)
# 计算需要处理的总 block 数
n_blocks = triton.cdiv(n_elements, BLOCK_SIZE)
# 循环处理分配给当前 program 的所有 blocks
for block_idx in range(pid, n_blocks, num_programs):
# 计算当前 block 的元素范围
offsets = block_idx * BLOCK_SIZE + tl.arange(0, BLOCK_SIZE)
mask = offsets < n_elements
# 加载数据
data = tl.load(data_ptr + offsets, mask=mask)
# 处理数据
result = process(data)
# 存储结果
tl.store(data_ptr + offsets, result, mask=mask)
# 调用:grid size 固定
n_elements = 10000
BLOCK_SIZE = 1024
grid = (256,) # 固定 256 个 programs
grid_stride_kernel[grid](data, n_elements, BLOCK_SIZE)
对于 Fixed-Size Grid 来说,每个 Program 只处理一个 Block; 但是对于 Grid-Stride Loop 来说,每个 Program 需要处理多个 Block
# Fixed-Size Grid
grid = (10,) # 启动 10 个 programs
Program 0 → Block 0 (元素 0-1023)
Program 1 → Block 1 (元素 1024-2047)
Program 2 → Block 2 (元素 2048-3071)
...
Program 9 → Block 9 (元素 9216-9999)
每个 program 处理 1 个 block 后结束
# Grid-Stride Loop
grid = (4,) # 只启动 4 个 programs
Program 0 → Block 0, Block 4, Block 8 (循环 3 次)
Program 1 → Block 1, Block 5, Block 9 (循环 3 次)
Program 2 → Block 2, Block 6 (循环 2 次)
Program 3 → Block 3, Block 7 (循环 2 次)
每个 program 通过循环处理多个 blocks
考虑 Grid-Stride Loop 中的下面这个循环:
# 没有 pipelining 的执行
for i in range(10):
data = load_from_memory(i) # 等待 ~200 cycles
result = compute(data) # 计算 ~10 cycles
store_to_memory(result, i) # 等待 ~200 cycles
# 大部分时间在等待内存!
我们可以同时处理 3 个迭代的不同阶段
迭代 0: [加载 0]
迭代 1: [加载 1] [计算 0]
迭代 2: [加载 2] [计算 1] [存储 0]
迭代 3: [计算 2] [存储 1] ← 加载迭代 3
迭代 4: [存储 2] ← 计算迭代 3 ← 加载迭代 4
在 Triton 中可以使用 Software Pipeline:
@triton.jit
def kernel_with_pipelining(data_ptr, n_elements, BLOCK_SIZE: tl.constexpr, num_stages: tl.constexpr):
pid = tl.program_id(0)
num_programs = tl.num_programs(0)
n_blocks = triton.cdiv(n_elements, BLOCK_SIZE)
# 关键:在 tl.range 中指定 num_stages
for block_idx in tl.range(pid, n_blocks, num_programs, num_stages=num_stages):
offsets = block_idx * BLOCK_SIZE + tl.arange(0, BLOCK_SIZE)
mask = offsets < n_elements
# 这些操作会被自动流水线化
data = tl.load(data_ptr + offsets, mask=mask) # Stage 1: Load
result = process(data) # Stage 2: Compute
tl.store(data_ptr + offsets, result, mask=mask) # Stage 3: Store
# 使用
grid = (256,)
kernel_with_pipelining[grid](data, n_elements, BLOCK_SIZE=1024, num_stages=3)
知道这些背景知识后,我们再来看 Fused Softmax 的实现:
@triton.jit
def softmax_kernel(output_ptr, input_ptr, input_row_stride, output_row_stride, n_rows, n_cols, BLOCK_SIZE: tl.constexpr, num_stages: tl.constexpr):
# starting row of the program
row_start = tl.program_id(0)
row_step = tl.num_programs(0)
for row_idx in tl.range(row_start, n_rows, row_step, num_stages=num_stages):
# The stride represents how much we need to increase the pointer to advance 1 row
row_start_ptr = input_ptr + row_idx * input_row_stride
# The block size is the next power of two greater than n_cols, so we can fit each
# row in a single block
col_offsets = tl.arange(0, BLOCK_SIZE)
input_ptrs = row_start_ptr + col_offsets
# Load the row into SRAM, using a mask since BLOCK_SIZE may be > than n_cols
mask = col_offsets < n_cols
row = tl.load(input_ptrs, mask=mask, other=-float('inf'))
# Subtract maximum for numerical stability
row_minus_max = row - tl.max(row, axis=0)
# Note that exponentiation in Triton is fast but approximate (i.e., think __expf in CUDA)
numerator = tl.exp(row_minus_max)
denominator = tl.sum(numerator, axis=0)
softmax_output = numerator / denominator
# Write back output to DRAM
output_row_start_ptr = output_ptr + row_idx * output_row_stride
output_ptrs = output_row_start_ptr + col_offsets
tl.store(output_ptrs, softmax_output, mask=mask)
对于教程中 Wrapper 的思路,这里就先不分析了
3-Matrix Multiplication
Roughly speaking, the kernel that we will write will implement the following blocked algorithm to multiply a (M, K) by a (K, N) matrix:
# Do in parallel
for m in range(0, M, BLOCK_SIZE_M):
# Do in parallel
for n in range(0, N, BLOCK_SIZE_N):
acc = zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=float32)
for k in range(0, K, BLOCK_SIZE_K):
a = A[m : m+BLOCK_SIZE_M, k : k+BLOCK_SIZE_K]
b = B[k : k+BLOCK_SIZE_K, n : n+BLOCK_SIZE_N]
acc += dot(a, b)
C[m : m+BLOCK_SIZE_M, n : n+BLOCK_SIZE_N] = acc
X[i, j]is given by&X[i, j] = X + i*stride_xi + j*stride_xj
&A[m : m+BLOCK_SIZE_M, k:k+BLOCK_SIZE_K] =
a_ptr + (m : m+BLOCK_SIZE_M)[:, None]*A.stride(0) + (k : k+BLOCK_SIZE_K)[None, :]*A.stride(1);
&B[k : k+BLOCK_SIZE_K, n:n+BLOCK_SIZE_N] =
b_ptr + (k : k+BLOCK_SIZE_K)[:, None]*B.stride(0) + (n : n+BLOCK_SIZE_N)[None, :]*B.stride(1);
从 A @ B = C 视角出发
C[i,j] = A[i,:] * B[:,j]
# 一种最简单的排布方式就是:
pid = tl.program_id(axis=0)
grid_n = tl.cdiv(N, BLOCK_SIZE_N)
pid_m = pid // grid_n
pid_n = pid % grid_n
# 比如 pid = 7,矩阵为 (4, 3)
# 7 就应该对应 (7//3 = 2, 7%3=1) => (2,1)
如果这么遍历 C[0,0] -> C[0, N] -> C[M,0] -> C[M, N] 的话,L2 Cache 没有得到充分利用,还存在一种更好的方式:
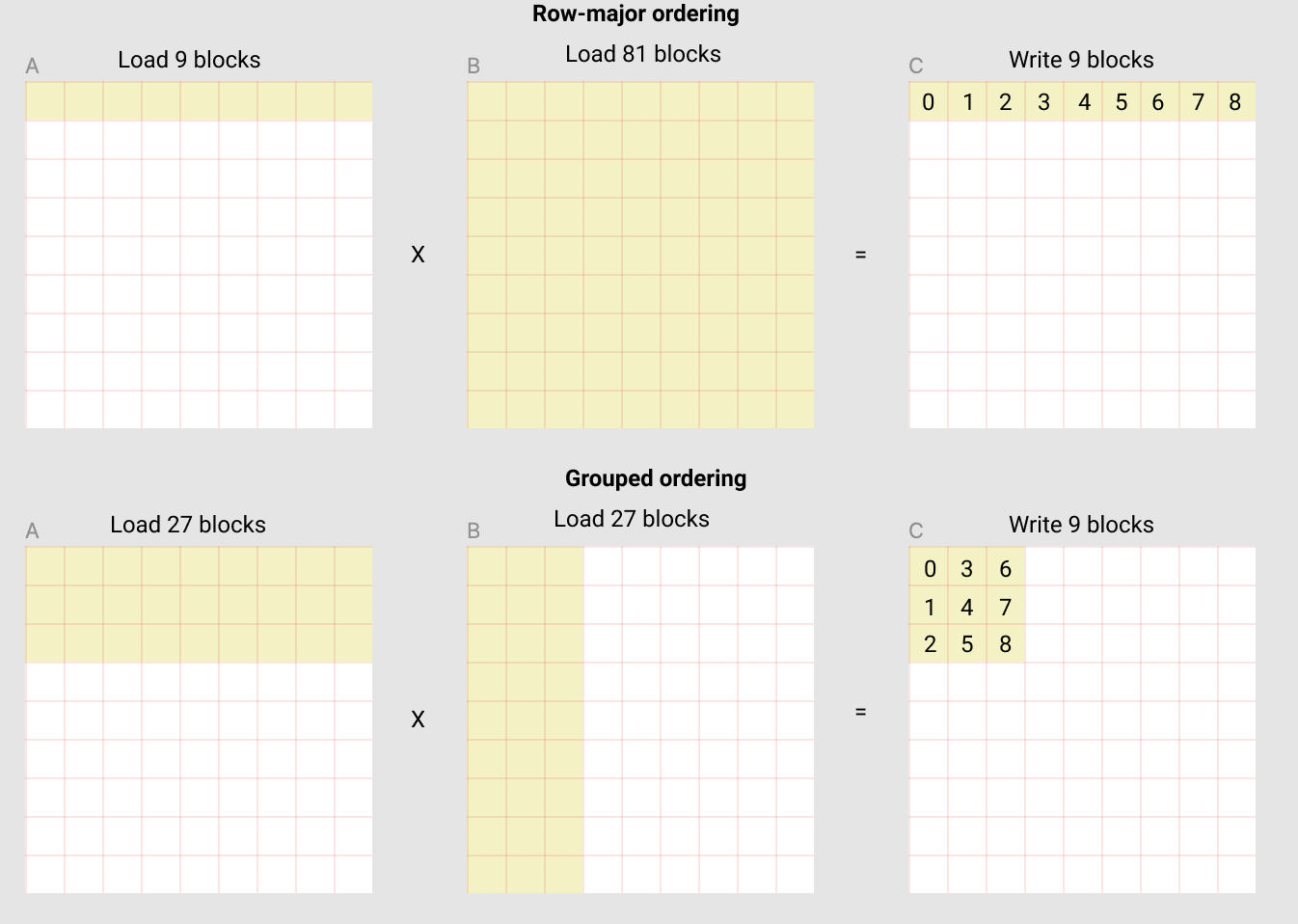
- 还可以换个方式理解,如果在 Row-major ordering 的情况下要复用,那我们需要整个 B 矩阵保存在 SRAM 中才行,比如 A 的第二行就可以复用整个 B 矩阵
- 但是用 Grouped ordering,算这 9 块时内部就能复用
- Row-major ordering 就是通常意义上的 row-major ordering
- 图中的 Grouped ordering 其实是 Grouped + colunm-major ordering
- 所以在计算下标时,需要涉及到先分组(横向切分)再 colunm-major 排序
相当于是要想一个算法,把
- 1 => (1, 0)
- 4 => (1, 1)
- 5 => (2, 1)
- 6 => (0, 3)
上去
由于在 C 中,横向的数字是连续,所以我们可以划分为一个 GROUP,所以一个 GROUP 大小为 GROUP_SIZE_M * num_pid_n
pid=0 pid=4 pid=8 pid=12 pid=16 pid=20 pid=24 pid=28
↓ ↓ ↓ ↓ ↓ ↓ ↓ ↓
┌────┬────┬────┬────┬────┬────┬────┬────┐
│ 0 │ 4 │ 8 │12 │16 │20 │24 │28 │ ← 行0
├────┼────┼────┼────┼────┼────┼────┼────┤
│ 1 │ 5 │ 9 │13 │17 │21 │25 │29 │ ← 行1
├────┼────┼────┼────┼────┼────┼────┼────┤
│ 2 │ 6 │10 │14 │18 │22 │26 │30 │ ← 行2
├────┼────┼────┼────┼────┼────┼────┼────┤
│ 3 │ 7 │11 │15 │19 │23 │27 │31 │ ← 行3
└────┴────┴────┴────┴────┴────┴────┴────┘
C 矩阵(12 行 × 8 列 blocks):
8 列(num_pid_n = 8)
←―――――――――――――――→
┌────────────────────┐ ↑
│ Group 0 │ │
│ (32 个 programs) │ │ 4行
│ │ │ (GROUP_SIZE_M)
├────────────────────┤ ↓
│ Group 1 │ ↑
│ (32 个 programs) │ │ 4行
│ │ │
├────────────────────┤ ↓
│ Group 2 │ ↑
│ (32 个 programs) │ │ 4行
│ │ │
└────────────────────┘ ↓
在一个 (m, n) 的矩阵中,如果是 row-major:
pid_m = pid // num_pid_n
pid_n = pid % num_pid_n
num_pid_m = 2
num_pid_n = 4
0 1 2 3
4 5 6 7
pid = 6
pid_m = 6 // 4 = 1
pid_n = 6 % 4 = 2
如果是 colunm-major:
pid_m = pid % num_pid_m
pid_n = pid // num_pid_m
num_pid_m = 2
num_pid_n = 4
0 2 4 6
1 3 5 7
pid = 5
pid_m = 5 % 2 = 1
pid_n = 5 // 2 = 2
下面的代码中其实就采用了 colunm-major
注意 group_size_m 是为了处理最后一个 group 可能不完整的边界情况
假设:
- num_pid_m = 10(C 矩阵有 10 行 blocks)
- GROUP_SIZE_M = 4(每个 group 想包含 4 行)
- 最后一个 group 应该只有 2 行
# Program ID
pid = tl.program_id(axis=0)
# Number of program ids along the M axis
num_pid_m = tl.cdiv(M, BLOCK_SIZE_M)
# Number of programs ids along the N axis
num_pid_n = tl.cdiv(N, BLOCK_SIZE_N)
# Number of programs in group
num_pid_in_group = GROUP_SIZE_M * num_pid_n
# Id of the group this program is in
group_id = pid // num_pid_in_group
# Row-id of the first program in the group
first_pid_m = group_id * GROUP_SIZE_M
# If `num_pid_m` isn't divisible by `GROUP_SIZE_M`, the last group is smaller
group_size_m = min(num_pid_m - first_pid_m, GROUP_SIZE_M)
# *Within groups*, programs are ordered in a column-major order
# Row-id of the program in the *launch grid*
pid_m = first_pid_m + ((pid % num_pid_in_group) % group_size_m)
# Col-id of the program in the *launch grid*
pid_n = (pid % num_pid_in_group) // group_size_m
接下来是指针算术部分:
# `a_ptrs` is a block of [BLOCK_SIZE_M, BLOCK_SIZE_K] pointers
# `b_ptrs` is a block of [BLOCK_SIZE_K, BLOCK_SIZE_N] pointers
# See above `Pointer Arithmetic` section for details
offs_am = (pid_m * BLOCK_SIZE_M + tl.arange(0, BLOCK_SIZE_M)) % M
offs_bn = (pid_n * BLOCK_SIZE_N + tl.arange(0, BLOCK_SIZE_N)) % N
offs_k = tl.arange(0, BLOCK_SIZE_K)
a_ptrs = a_ptr + (offs_am[:, None] * stride_am + offs_k[None, :] * stride_ak)
b_ptrs = b_ptr + (offs_k[:, None] * stride_bk + offs_bn[None, :] * stride_bn)
"""
[:, None] turns [m1,m2,m3] into [[m1],[m2],[m3]]
[None, :] turns [n1,n2,n3] into [[n1,n2,n3]]
combining them gives the matrix
[[m1n1, m1n2, m1n3],
[m2n1, m2n2, m2n3],
[m3n1, m3n2, m3n3]]
"""
- 要加载一个二维矩阵,你也必须提供一个二维指针
- 这里可以认为是进行了一次广播
比如:
M = 9
N = 9
0 1 2 3 4 5 6 7 8
9 10 11 12 13 14 15 16 17
18 19 20 21 22 23 24 25 26
27 28 29 30 31 32 33 34 35
36 37 38 39 40 41 42 43 44
45 46 47 48 49 50 51 52 53
54 55 56 57 58 59 60 61 62
63 64 65 66 67 68 69 70 71
72 73 74 75 76 77 78 79 80
stride_am = 9
stride_ak = 1
stride_bk = 9
stride_bn = 1
offs_am = [0:3]
offs_k = [0:3]
offs_bn = [0:3]
offs_am[:, None] * stride_am -> [[0], [1], [2]] * stride_am -> [[0], [9], [18]]
offs_k[None, :] * stride_ak -> [[0, 1, 2]] * 1
[[0], [9], [18]] + [[0, 1, 2]] ->
array([[ 0, 1, 2],
[ 9, 10, 11],
[18, 19, 20]])
最后是核心计算部分:
accumulator = tl.zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=tl.float32)
for k in range(0, tl.cdiv(K, BLOCK_SIZE_K)):
# Load the next block of A and B, generate a mask by checking the K dimension.
# If it is out of bounds, set it to 0.
a = tl.load(a_ptrs, mask=offs_k[None, :] < K - k * BLOCK_SIZE_K, other=0.0)
b = tl.load(b_ptrs, mask=offs_k[:, None] < K - k * BLOCK_SIZE_K, other=0.0)
# We accumulate along the K dimension.
accumulator = tl.dot(a, b, accumulator)
# Advance the ptrs to the next K block.
a_ptrs += BLOCK_SIZE_K * stride_ak
b_ptrs += BLOCK_SIZE_K * stride_bk
# You can fuse arbitrary activation functions here
# while the accumulator is still in FP32!
if ACTIVATION == "leaky_relu":
accumulator = leaky_relu(accumulator)
c = accumulator.to(tl.float16)
# -----------------------------------------------------------
# Write back the block of the output matrix C with masks.
offs_cm = pid_m * BLOCK_SIZE_M + tl.arange(0, BLOCK_SIZE_M)
offs_cn = pid_n * BLOCK_SIZE_N + tl.arange(0, BLOCK_SIZE_N)
c_ptrs = c_ptr + stride_cm * offs_cm[:, None] + stride_cn * offs_cn[None, :]
c_mask = (offs_cm[:, None] < M) & (offs_cn[None, :] < N)
tl.store(c_ptrs, c, mask=c_mask)